
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Stepper Motors və Servo və Servo Motors arasındakı fərqi başa düşmək üçün bir məqalə
I. Stepper Motors və Servo və Servo Motors arasındakı fərqlər
Stepper Motor: Elektrik nəbzi siqnalı, açın yerdəyişmə və ya açıq loop idarəetmə elementinin yerdəyişmə yerdəyişməsidir. Sadəcə qoyun, bucağı və növbələrin sayını idarə etmək üçün elektrik nəbz siqnalına güvənir. Beləliklə, o, yalnız nə qədər fırlanmanı təyin etmək üçün nəbz siqnalına güvənir. Sensor olmadığı üçün dayanma bucağı sapma ola bilər. Ancaq dəqiq nəbz siqnalı sapmanı minimuma endirir.
SERVO MOTOR: Servo-nun fırlanma vəziyyətini idarə etmək üçün sensor vasitəsilə motorun sürətini idarə etmək üçün servo nəzarət dövrəsinə etibar edin. Beləliklə, mövqe nəzarəti çox dəqiqdir. Və fırlanma sürəti də dəyişkəndir.
Servo (Elektron Servo): Servonun əsas komponenti servo motorudur. Bu servo motor idarəetmə dövrə + azalma dişli dəsti var. Bəli, servo motorunun azaldılması dişli dəsti yoxdur. Və servonun azaldılması dişli dəsti var.
Bir limit servo vəziyyətində, sükan qolunun sükannaməsini təyin etmək üçün çıxış şaftının altındakı bir potensiometrə güvənir. Servo siqnal nəzarəti, mikroiontrollerin bu siqnalı asanlıqla yarada biləcəyi bir pulse eni modulyasiya edilmiş (pwm) siqnaldır.
II. Stepper motorun əsas prinsipi
Necə işləyir:
Normalda bir motorun rotoru daimi bir maqnitdir və stator sarımları vasitəsilə cari axınları, stator sarımları bir vektor maqnit sahəsi istehsal edir. Bu maqnit sahəsi rotoru bucaqla döndərmək üçün rotoru idarə edəcək, buna görə rotorun maqnit sahələrinin bir cütü, statorun maqnit sahəsinin istiqamətində eyni olacaqdır. Statorun vektor maqnit sahəsi bucaqla fırlanır. Rotor da bu maqnit sahəsi ilə bir bucaqla fırlanır. Hər giriş elektrik nəbzi üçün motor bir bucaqlı addım irəli dönür. Onun çıxış bucaqları yerdəyişməsi giriş paxlası sayına mütənasibdir və onun fırlanma sürəti paxlalıların tezliyinə mütənasibdir. Səlahiyyətlərin enerjili olduğu qaydada dəyişdirərək motor tərsinə çevrilir. Buna görə də, nəbzlərin sayı və tezliyi və motorun hər bir mərhələsinin hər bir mərhələsinin sarımlarını enerjisiz qaydası, Stepper motorunun fırlanmasını idarə etmək üçün idarə edilə bilər.
İstilik nəsli prinsipi:
Adətən hər cür mühərriklərə baxır, daxili dəmir nüvəli və dolama bobindir. Küləyi müqavimət, güc zərər, zərər ölçüsü və müqavimət və cərəyan, cari standart DC və ya Sine dalğası olmadıqda, misal itkisi kimi adlandırılan meydanda mütənasibdir. Core Histerizes Eddy Cari effekti, alternativ maqnit sahəsində də itkisi, cari, tezlik, gərginlik, dəmir itkisi adlanan material, cari, tezlikli, gərginlik ölçüsü də zərər verəcəkdir. Mis itkisi və dəmir itkisi, motorun səmərəliliyinə təsir edən istilik nəsil şəklində özünü göstərəcəkdir. Motorping Motorping Motorping Dəqiqliyi və fırlanma anı, səmərəliliyi nisbətən aşağı, cərəyan ümumiyyətlə daha böyükdür və harmonik komponentlər, sürətlə və dəyişən mühərriklərin tezliyi, buna görə də iş vəziyyəti olan bir istilik vəziyyətinə malikdir və vəziyyət ümumi AC motorundan daha ciddidir.
III. Rul inşaat
Servo əsasən bir mənzil, bir dövrə lövhəsi, sürücü motoru, dişli azalma və bir mövqe aşkarlayan elementdən ibarətdir. Onun iş prinsipi, servoya bir siqnal göndərməsidir və dövrə lövhəsindəki ickanın fırlanmamağa başlaması və gücü azaltma qurğusu ilə sürüşmə qoluna ötürülür və mövqe detektoru, mövqedə və ya olmamağının olub olmadığını müəyyən etmək üçün bir siqnal göndərir. Vəzifə detektoru əslində dəyişkən bir rezistordur. Servo dönəndə, rezistor dəyəri müvafiq olaraq dəyişəcək və rotasiya açısı rezistor dəyərini aşkar etməklə məlum ola bilər. General Servo motoru üç qütblü rotorun ətrafında bükülmüş, cari axınlar, maqnit bir sahə meydana gətirəcəyi və rotor maqnitinin periferinin, rotor maqnitinin periferiyasını, bu da öz növbəsində fırlanma gücünü yaradan istehsal etmək üçün rotor maqnitinin periferiyası olacaqdır. Fizikaya görə, bir obyektin ətalət anbarı onun kütləsinə birbaşa mütənasibdir, buna görə də o, hücecin kütləsi nə qədər çoxdursa, güc tələb olunur. Sürətli fırlanma sürətinə və aşağı enerji istehlakına nail olmaq üçün, servo çox incə bir boşluq silindrinə bükülmüş, çox yüngül bir içi boş bir rotoru meydana gətirərək, içi kubok motoru olan silindrin içərisinə yerləşdirilir və maqnitlər yerləşdirilir.
Fərqli iş mühitinə uyğun olmaq üçün suya davamlı və toz keçirməyən dizaynlar var; Fərqli yük tələblərinə cavab olaraq, servos üçün plastik və metal dişli var və servos üçün metal dişlilər ümumiyyətlə yüksək fırlanma anı və yüksək sürətlə, dişlilərin həddindən artıq yüklərə görə çırpılmayacaqları üstünlüyü ilə yüksək fırlanma anı və yüksək sürətlidir. Daha yüksək dərəcəli servos, fırlanma daha sürətli və daha dəqiq etmək üçün top rulmanları ilə təchiz ediləcəkdir. Bir top rulmanı və iki top rulmanı arasında bir fərq var, əlbəttə ki, iki top rulmanı daha yaxşıdır. Yeni feter servos, əsasən, aşağı daxili müqavimət və buna görə normal tranzistorlardan daha az mövcud itkisi olan FET (Sahə effekti tranzistoru) istifadə edir.
İv. Servo əməliyyat prinsipi
PWM dalğasından etibarən bir qərəzli bir dövrə yaratmaq üçün daxili dövrə daxil olmaq üçün, kotensiometrin hərəkət etmək üçün gücləndiricini idarə etmək üçün, yüksəliş fərqi sıfırın sıfıra çıxması üçün, motor dayanır, motor dayanır, buna görə də servonun təsirinə nail olmaq üçün dayanır.
Servo pwms üçün protokollar hamısı eynidir, lakin görünəcək ən son servos fərqli ola bilər.
Protokol ümumiyyətlə: 0.5ms ~ 2,5ms ~ 2.5ms-də müxtəlif açılardan keçmək üçün servoya nəzarət etmək.
V. Servo mühərriklərinin necə işlədiyi
Aşağıdakı rəqəm, güc əməliyyatı gücləndiricisi LM675 ilə hazırlanmış bir servo motor nəzarət dövrəsini göstərir və motor bir DC Servo motorudur. Fiqurdan göründüyü kimi, güc əməliyyatı gücləndiricisi LM675 15V ilə təchiz edilmişdir və 15V gərginliyi LM675-dən Əməliyyat Amplifier LM675-nin daxilində və LM675-in çıxış gərginliyi Servo motorunun girişinə əlavə olunur. Motor, motor sürətinin real vaxt aşkarlanması üçün sürət ölçmə siqnal generatoru ilə təchiz edilmişdir. Əslində, sürətli siqnal generatoru bir növ generatordur və çıxış gərginliyi fırlanma sürətinə mütənasibdir. Sürət ölçmə siqnalının sürəti generatoru Generativ Gençe Genişləndiricinin Gərginlik Gücləndiricisinin Gərginlik Bölgəsi Dövründən sonra sürətli səhv siqnalı olaraq inverting girişinə yenidən qidalanır. Sürət əmrinə görə, potensionometr RP1 tərəfindən təyin olunan gərginlik dəyəri R1.r2 tərəfindən gərginlik bölgüsü ilə işləmə gücləndiricisinin giriş gücləndiricisinin giriş gərginliyinə ekvivalenti olan faza girişinə əlavə olunur.
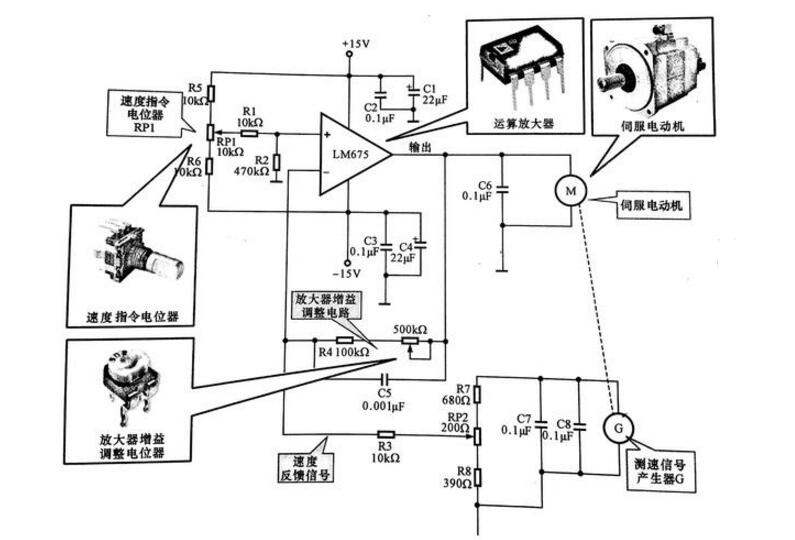
Servo motorunun sxematik nəzarət
Servomotor: Servomotor üçün m hərfi ilə göstərilmişdir, sürücü sistemi üçün güc mənbəyidir. Əməliyyat gücləndiricisi: Dövrə adı, I.E., LM675, Servo motoru üçün sürücüyə cərəyanını təmin edən servo idarəetmə dövrəsindəki bir gücləndirici parçadır.
Sürət əmri Potentiometer RP1: Dövrdə əməliyyat gücləndiricisinin arayış gərginliyini təyin edir, yəni sürət qəbulu. Gücləndiricinin tənzimlənməsi Potentiometer RP2: Müvafiq olaraq gücləndirici qazanc və sürət rəy siqnalının ölçüsünü düzəltmək üçün dövrədə istifadə olunur.
Motorun yükü, əməliyyat gücləndiricisinin ters çevrilməsinin ters çevrilməsinə, sürətlə azalır və sürət siqnal generatorunun çıxış gərginliyi azalır və bu gərginlik və istinad gərginliyi arasındakı fərqi və çıxış gərginliyi artmaqdadır. Əməliyyat gücləndiricisi artır. Əksinə, yük daha kiçik olduqda, sürətləndirmə siqnal generatorunun çıxış gərginliyi artır, bu gərginlik və istinad gərginliyi arasındakı fərqi azaldır, bu da motor sürəti avtomatik olaraq sabitləşə bilər.
Sorğu göndərin



X
Biz sizə daha yaxşı baxış təcrübəsi təklif etmək, sayt trafikini təhlil etmək və məzmunu fərdiləşdirmək üçün kukilərdən istifadə edirik. Bu saytdan istifadə etməklə siz kukilərdən istifadəmizlə razılaşırsınız.
Məxfilik Siyasəti